


British inventor and YouTuber James Bruton has a behavior of fixing issues no person requested him to unravel – after which fixing them once more, more durable. The person behind the screw-drive motorcycle (sure, it strikes on spinning cylinders as a substitute of wheels) and a rideable electrical Lego skateboard has now tackled what is likely to be his most deranged engineering flex but: an electrical moto that balances on a single big ball.
If that sounds acquainted, it is as a result of Bruton already constructed a two-ball version – a “ball bike” that stayed upright by spinning one sphere beneath every finish of the body. The logical subsequent step, apparently, was to take away one ball solely and see what occurred. The reply, as you would possibly anticipate, is: loads.
I constructed an Omni-Directional ONE-BALL Bike
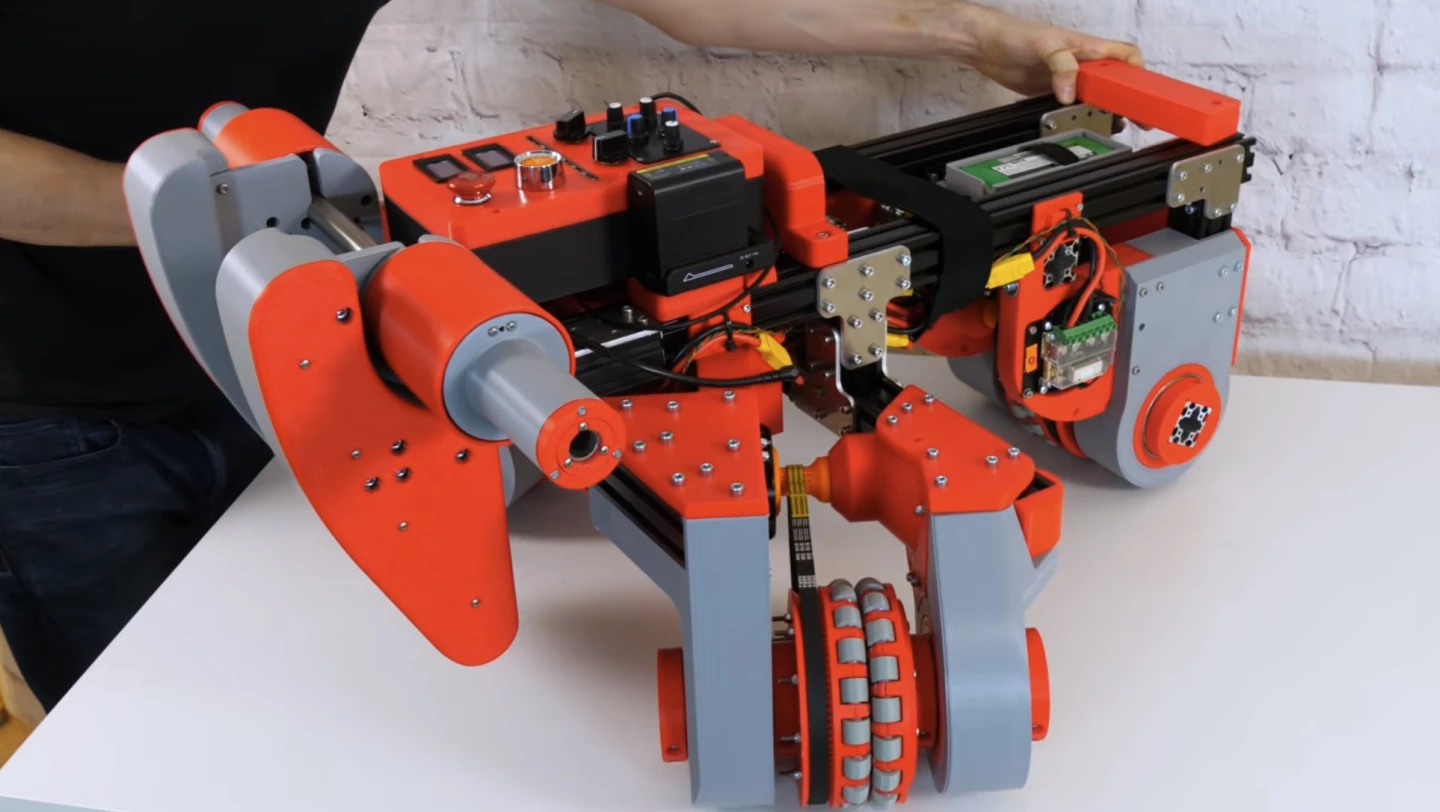
The brand new machine balances its whole body – and a full-grown grownup rider – on a single bright-red sphere. That ball is pushed by three {custom} omni-wheels, every powered by a motor rated as much as 2 kW, and organized in order that they sit at equal distances on the higher floor. By spinning these wheels at totally different speeds and instructions, the management system can push the ball in any horizontal route, which is how the bike strikes and the way it stays upright.
The omni-wheels themselves are an engineering venture in their very own proper. Moderately than mendacity flat (the standard configuration in balancing robots), Bruton mounted them vertically. This lets the passive rollers – the small barrel-shaped wheels that allow an omni-wheel slide sideways – spin freely with out jamming towards one another at larger speeds. Every of the three massive wheels carries two rows of 18 passive rollers, totaling 216 rollers throughout the entire drive system. Each curler runs by itself bearing, with {custom} aluminum hubs and TPU (thermoplastic polyurethane, a versatile 3D-printing materials) tires.
James Bruton/YouTube
The velocity relationship between the three motors follows primary trigonometry. When the bike travels in a straight line, the 2 wheels angled at 60° to the route of journey spin at half the velocity of the forward-facing wheel. Change route, and people ratios shift accordingly.
Energy comes from six LiPo (lithium polymer) battery packs wired in collection pairs to ship 50 volts, and the body is constructed from 40 x 40-mm (1.6 x 1.6-in) aluminum extrusion profile, with most structural elements 3D-printed. A PID controller – a closed-loop algorithm that constantly corrects for error – reads tilt information from an IMU (inertial measurement unit, primarily a chip that is aware of which method is down) and adjusts all three motors concurrently to maintain the ‘bike’ upright in each the front-back and side-to-side planes without delay.
Halving the ball rely does not halve the issues – it doubles them. The 2-ball model steered by spinning every ball in reverse instructions. With just one ball, that trick is gone. Bruton figured this out quick throughout early testing and was characteristically blunt about it: “No, it is merely uncontrollable.”
James Bruton/YouTube
His interim repair is a big foam fin – hot-glued to the body – that acts like a management floor to catch air and bias the route of journey. Consider the angular entrance fins on a Star Wars speeder bike: similar precept, minus the CGI funds. It additionally, someway, works.
The opposite unsolved drawback is static electrical energy. The plastic ball and rubber rollers construct up cost that scrambles the electronics and causes surprising shutdowns. Bruton’s hair visibly stood on finish throughout testing – a enjoyable visible, however much less enjoyable when the bike cuts out mid-run.
All code and CAD recordsdata are revealed open-source, giving different engineers a stable basis to construct on. Bruton’s subsequent video will sort out the steering drawback immediately, and that is the actual check of whether or not this splendidly absurd machine has a future past his workshop ground.
Supply: James Bruton