


AI-driven drone from College of Klagenfurt makes use of IDS uEye digicam for real-time, object-relative navigation—enabling safer, extra environment friendly, and exact inspections.
The inspection of crucial infrastructures comparable to vitality crops, bridges or industrial complexes is crucial to make sure their security, reliability and long-term performance. Conventional inspection strategies all the time require the usage of folks in areas which can be troublesome to entry or dangerous. Autonomous cell robots provide nice potential for making inspections extra environment friendly, safer and extra correct. Uncrewed aerial automobiles (UAVs) comparable to drones specifically have change into established as promising platforms, as they can be utilized flexibly and might even attain areas which can be troublesome to entry from the air. One of many largest challenges right here is to navigate the drone exactly relative to the objects to be inspected with a purpose to reliably seize high-resolution picture knowledge or different sensor knowledge.
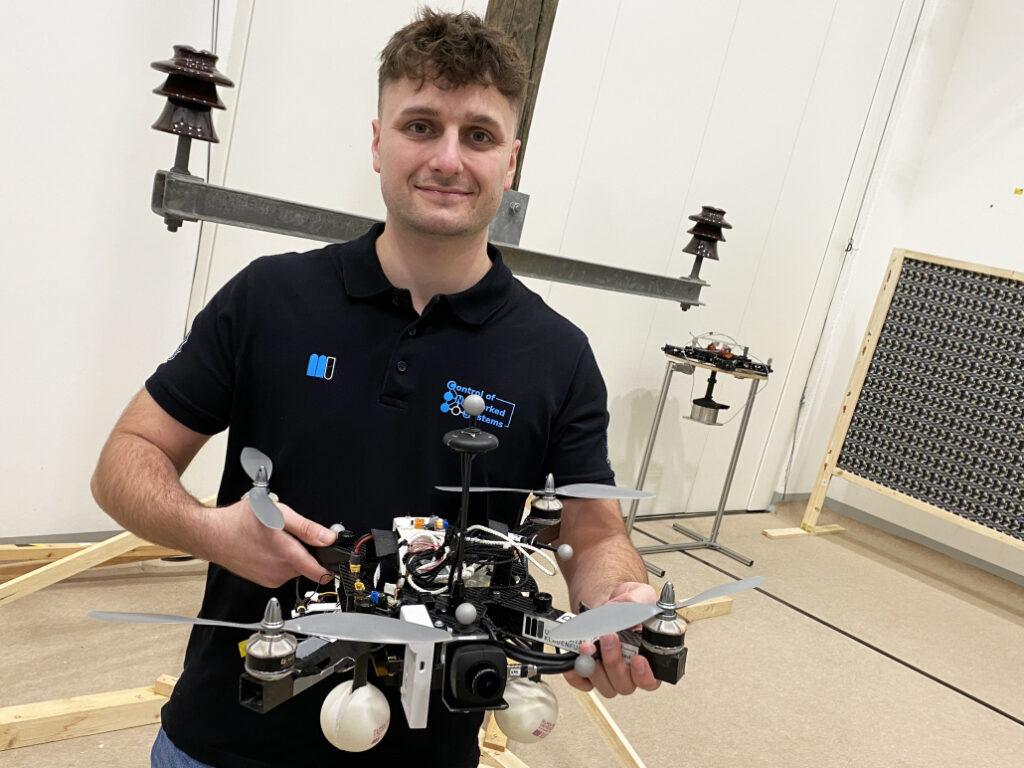
A analysis group on the College of Klagenfurt has designed a real-time succesful drone primarily based on object-relative navigation utilizing synthetic intelligence. Additionally on board: a USB3 Imaginative and prescient industrial digicam from the uEye LE household from IDS Imaging Improvement Programs GmbH.
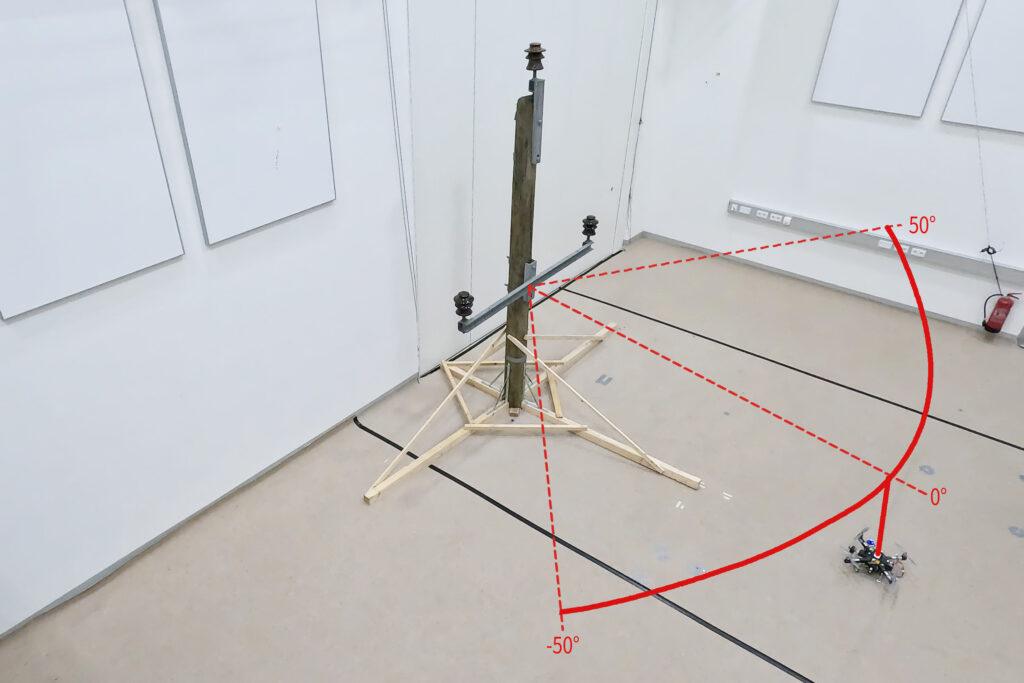
As a part of the analysis challenge, which was funded by the Austrian Federal Ministry for Local weather Motion, Surroundings, Vitality, Mobility, Innovation and Know-how (BMK), the drone should autonomously recognise what’s an influence pole and what’s an insulator on the facility pole. It should fly across the insulator at a distance of three meters and take photos. „Exact localisation is necessary such that the digicam recordings may also be in contrast throughout a number of inspection flights,“ explains Thomas Georg Jantos, PhD scholar and member of the Management of Networked Programs analysis group on the College of Klagenfurt. The prerequisite for that is that object-relative navigation should have the ability to extract so-called semantic details about the objects in query from the uncooked sensory knowledge captured by the digicam. Semantic data makes uncooked knowledge, on this case the digicam photos, „comprehensible“ and makes it potential not solely to seize the setting, but in addition to appropriately determine and localise related objects.
On this case, which means a picture pixel is just not solely understood as an unbiased color worth (e.g. RGB worth), however as a part of an object, e.g. an isolator. In distinction to basic GNNS (International Navigation Satellite tv for pc System), this strategy not solely supplies a place in area, but in addition a exact relative place and orientation with respect to the article to be inspected (e.g. „Drone is positioned 1.5m to the left of the higher insulator“).
The important thing requirement is that picture processing and knowledge interpretation have to be latency-free in order that the drone can adapt its navigation and interplay to the precise circumstances and necessities of the inspection activity in actual time.
Semantic data via clever picture processing
Object recognition, object classification and object pose estimation are carried out utilizing synthetic intelligence in picture processing. „In distinction to GNSS-based inspection approaches utilizing drones, our AI with its semantic data allows the inspection of the infrastructure to be inspected from sure reproducible viewpoints,“ explains Thomas Jantos. „As well as, the chosen strategy doesn’t endure from the same old GNSS issues comparable to multi-pathing and shadowing brought on by massive infrastructures or valleys, which may result in sign degradation and thus to security dangers.“

How a lot AI matches right into a small quadcopter?
The {hardware} setup consists of a TWINs Science Copter platform outfitted with a Pixhawk PX4 autopilot, an NVIDIA Jetson Orin AGX 64GB DevKit as on-board laptop and a USB3 Imaginative and prescient industrial digicam from IDS. „The problem is to get the bogus intelligence onto the small helicopters.
The computer systems on the drone are nonetheless too sluggish in comparison with the computer systems used to coach the AI. With the primary profitable exams, that is nonetheless the topic of present analysis,“ says Thomas Jantos, describing the issue of additional optimising the high-performance AI mannequin to be used on the on-board laptop.
The digicam, alternatively, delivers good fundamental knowledge immediately, because the exams within the college’s personal drone corridor present. When choosing an acceptable digicam mannequin, it was not only a query of assembly the necessities by way of velocity, measurement, safety class and, final however not least, worth. „The digicam’s capabilities are important for the inspection system’s modern AI-based navigation algorithm,“ says Thomas Jantos. He opted for the U3-3276LE C-HQ mannequin, a space-saving and cost-effective challenge digicam from the uEye LE household. The built-in Sony Pregius IMX265 sensor might be the very best CMOS picture sensor within the 3 MP class and allows a decision of three.19 megapixels (2064 x 1544 px) with a body charge of as much as 58.0 fps. The built-in 1/1.8″ world shutter, which doesn’t produce any ‚distorted‘ photos at these quick publicity occasions in comparison with a rolling shutter, is decisive for the efficiency of the sensor. „To make sure a protected and sturdy inspection flight, excessive picture high quality and body charges are important,“ Thomas Jantos emphasises. As a navigation digicam, the uEye LE supplies the embedded AI with the excellent picture knowledge that the on-board laptop must calculate the relative place and orientation with respect to the article to be inspected. Primarily based on this data, the drone is ready to right its pose in actual time.
The IDS digicam is linked to the on-board laptop through a USB3 interface. „With the assistance of the IDS peak SDK, we will combine the digicam and its functionalities very simply into the ROS (Robotic Working System) and thus into our drone,“ explains Thomas Jantos. IDS peak additionally allows environment friendly uncooked picture processing and easy adjustment of recording parameters comparable to auto publicity, auto white Balancing, auto acquire and picture downsampling.
To make sure a excessive degree of autonomy, management, mission administration, security monitoring and knowledge recording, the researchers use the source-available CNS Flight Stack on the on-board laptop. The CNS Flight Stack consists of software program modules for navigation, sensor fusion and management algorithms and allows the autonomous execution of reproducible and customisable missions. „The modularity of the CNS Flight Stack and the ROS interfaces allow us to seamlessly combine our sensors and the AI-based ’state estimator‘ for place detection into your complete stack and thus realise autonomous UAV flights. The performance of our strategy is being analysed and developed utilizing the instance of an inspection flight round an influence pole within the drone corridor on the College of Klagenfurt,“ explains Thomas Jantos.
Exact, autonomous alignment via sensor fusion
The high-frequency management alerts for the drone are generated by the IMU (Inertial Measurement Unit). Sensor fusion with digicam knowledge, LIDAR or GNSS (International Navigation Satellite tv for pc System) allows real-time navigation and stabilisation of the drone – for instance for place corrections or exact alignment with inspection objects. For the Klagenfurt drone, the IMU of the PX4 is used as a dynamic mannequin in an EKF (Prolonged Kalman Filter). The EKF estimates the place the drone ought to be now primarily based on the final recognized place, velocity and angle. New knowledge (e.g. from IMU, GNSS or digicam) is then recorded at as much as 200 Hz and incorprated into the state estimation course of.
The digicam captures uncooked photos at 50 fps and a picture measurement of 1280 x 960px. „That is the utmost body charge that we will obtain with our AI mannequin on the drone’s onboard laptop,“ explains Thomas Jantos. When the digicam is began, an automated white steadiness and acquire adjustment are carried out as soon as, whereas the automated publicity management stays switched off. The EKF compares the prediction and measurement and corrects the estimate accordingly. This ensures that the drone stays steady and might keep its place autonomously with excessive precision.

Outlook
„With regard to analysis within the area of cell robots, industrial cameras are vital for a wide range of functions and algorithms. It’s important that these cameras are sturdy, compact, light-weight, quick and have a excessive decision. On-device pre-processing (e.g. binning) can also be crucial, because it saves helpful computing time and sources on the cell robotic,“ emphasises Thomas Jantos.
With corresponding options, IDS cameras are serving to to set a brand new customary within the autonomous inspection of crucial infrastructures on this promising analysis strategy, which considerably will increase security, effectivity and knowledge high quality.
The Control of Networked Systems (CNS) research group is a part of the Institute for Clever System Applied sciences. It’s concerned in educating within the English-language Bachelor’s and Grasp’s applications „Robotics and AI“ and „Data and Communications Engineering (ICE)“ on the College of Klagenfurt. The group’s analysis focuses on management engineering, state estimation, path and movement planning, modeling of dynamic techniques, numerical simulations and the automation of cell robots in a swarm: More information

Mannequin used:USB3 Imaginative and prescient Industriekamera U3-3276LE Rev.1.2
Digital camera household: uEye LE
Picture rights: Alpen-Adria-Universität (aau) Klagenfurt
© 2025 IDS Imaging Improvement Programs GmbH